| 价格 | 面议 |
|---|---|
| 品牌 | 西门子 |
| 区域 | 全国 |
| 来源 | 上海朕锌电气设备有限公司 |
详情描述:
西门子55千瓦变频器MM440 6SE6440-2UD35-5FB1MICROMASTER 440 无滤波器 380-480V 10/-10% 三相交流 47-63Hz 恒定转矩 55kW 过载 150% 60S,200% 3S 二次矩 75kW 850x 350x 320(高x宽x深) 防护等级 IP20 环境温度 -10 50?C 无 AOP/BOP 一、概述 这两种形式的 Firmware V2.4 及以上版本都已具备基本定位功能。当前V2.4 版本的 S120具有如下定位功能: 使用 S120 基本定位功能的前提条件: 注: 二、激活基本定位功能 定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置 定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置 使用控制面板 使用专家参数表 使用控制面板的操作步骤: 三、基本定位_点动(JOG) S120 中基本定位功能的点动有两种方式: ? 使用控制面板的点动功能仅限于速度方式,位置方式需使用专家参数表设定。 ? 执行点动功能,应先使能变频器ON/OFF1(P0840) 四、基本定位_回零(Homing / Reference) 4.1设置参考点 (Set_Reference) 操作步骤(已设定开关量输入点 DI2 为ON/OFF1命令源 P840) 4.2主动回零(Active Homing) 主动回零有三种方式:
S120 有两种形式:
用于多轴系统的 DC/AC 装置
用于单轴系统的 AC/AC 装置
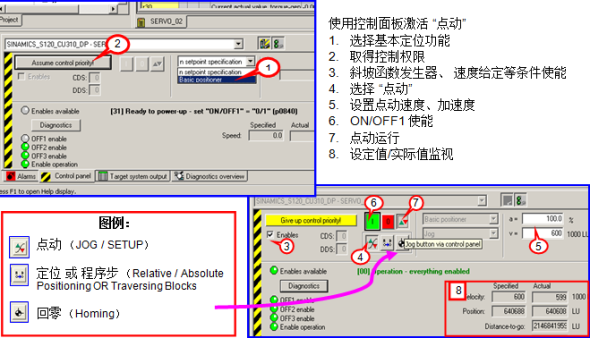
? 点动 (Jog): 用于手动方式移动轴,通过按钮使轴运行至目标点
? 回零 (Homing/Reference):用于定义轴的参考点或运行中回零
? 限位 (Limits):用于限制轴的速度、位置。包括软限位、硬限位
? 程序步 (Traversing Blocks): 共64个程序步,可自动连续执行一个完整的程序也可单步执行
? 直接设定值输入/手动设定值输入 (Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
调试软件:Starter V4.0 或更高版本 / SCOUT V4.0 或更高版本
硬件版本:SINAMICS FW: V2.4 HF2 或更高版本
安装 SCOUT V4.0 需要STEP 7 版本至少为 V5.3.3.1 以上
S120的定位功能必须在变频器离线配置中激活,步骤如下: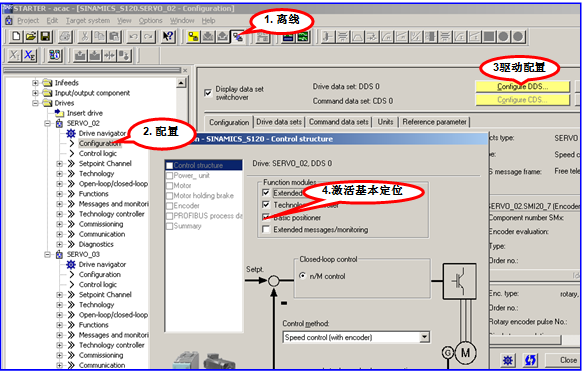
? 速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
? 位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。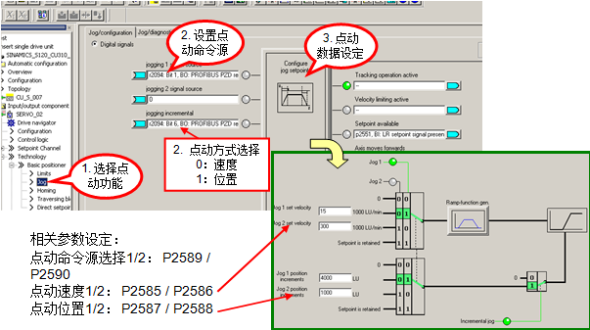
回零/寻参(Homing / Reference)
回参考点模式(回零模式)只有使用增量编码器(旋转编码器 Reserver、正/余弦编码器Sin/Cos 或 脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。因此轴都必须被移至预先定义好的零点位置。即执行 Homing 功能。
当使用编码器 ( Absolute ) 时每次上电不需重新回零。
S120 中回零有三种方式:
? 直接设定参考点 (Reference): 对任意编码器均可
? 主动回零 (Reference point approach): 主要指增量编码器
? 动态回零 (Flying Reference):对任意编码器均可
通过用户程序可设置任意位置为坐标原点。通常情况下只有当系统即无接近开关又无编码器的零脉冲时,或者当需要轴被设置为一个不同的位置时才使用该方式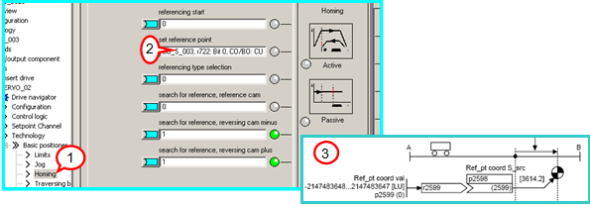
1. 进入“Homing”
2. 连接一数字量输入点 ( DI 1 )至参数 P2596作为设置参考点信号位,该位上升沿有效
3. 设定参考点位置坐标值 P2599(如 0)
4. 闭合DI 2运行使能
5. 闭合DI 1 激活“设置参考点”命令,于是该轴当前位置 r 2521 立即被置为P2599 中设定的值。如 r2521=0
主动回零方式只适用于增量编码器,值编码器只需在初始化阶段进行一次编码器校准,以后不必做回零
仅用编码器零标志位( Encoder Zero Mark ) 回零
仅用外部零标志( External Zero Mark ) 回零
使用接近开关 编码器零标志位( Homing output cam Zero Mark ) 回零
| 联系人 | 钟涛 |
|---|

